

产品概述:
复合机器人平台:基于协作机器人与 AMR(自主移动机器人)技术的完美结合,体积小巧,运动灵 活,布置场景简单并快速,可搭载 2D/3D 视觉系统,支持单机平板操作系统与多机调度系统方案,主 要应用于智能制造行业,轻型搬运场景,人机混场工作。
产品特点:
集成控制器:协作机器人、AMR(自主移动机器人)、控制器融合成一台控制器。
应用编程简单:协作机器人、AMR(自主移动机器人)集成到同一个编程软件上使用。
多场景通用:智能搬运机器人,自主移动,无轨导航。
流程图编程:有允许用户编辑的任务模块软件,用户可自身需求随意设计机器人的行为,零基础 操作。

主要设备与模块:
智能协作机器人
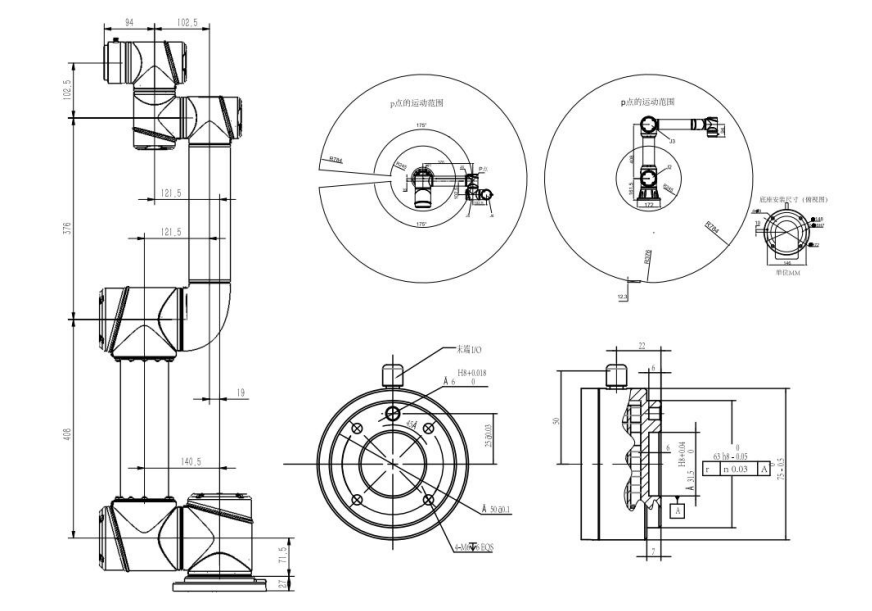
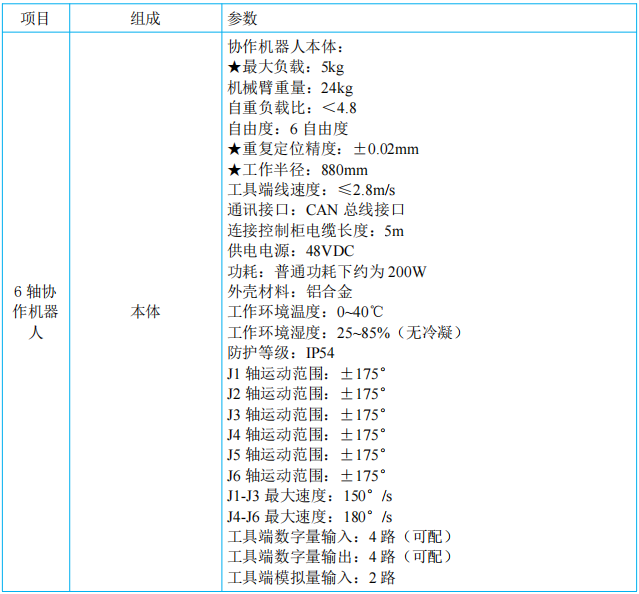
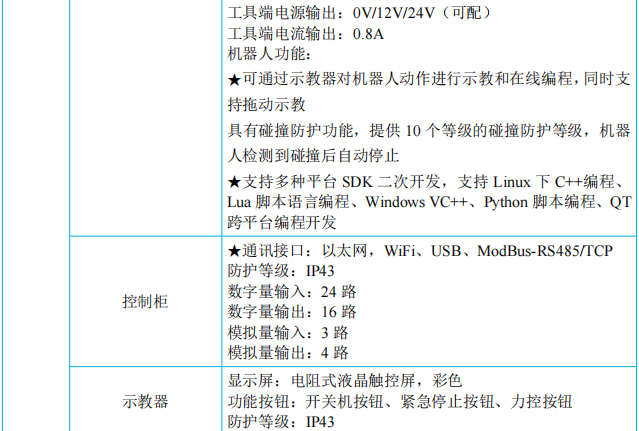
6 轴协作机器人主要由机器人本体、控制柜和示教器组成。机器人本体模仿人的手臂,共有 6 个旋转关 节,每个关节表示一个自由度。机器人关节包括基座(关节 1),肩部(关节 2),肘部(关节 3),腕部 1(关节 4),腕部 2(关节 5)和腕部 3(关节 6)。基座用于机器人本体和机器人导轨连接,工具端用于 机器人与快换连接。肩部和肘部之间以及肘部和腕部之间采用臂管连接。通过示教器操作或拖动示教,用 户可以控制各个关节转动,使机器人末端工具移动到不同的位姿。
协作机器人系统

外形尺寸及工作范围:
协作机器人机械参数
AMR机器人
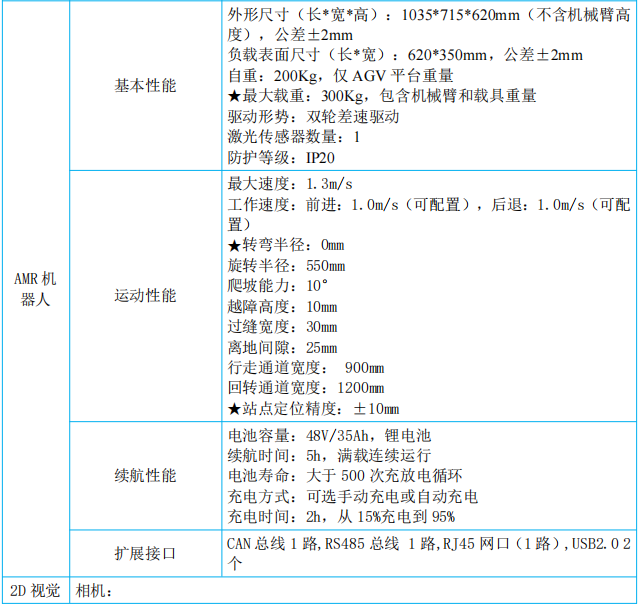
AMR 机器人
ARM 机器人采用高精度 SLAM 激光雷达进行导航与定位,2 轮差速运动控制,高容量锂电池供电,支 持自动充电,负载能力不低于 300Kg,可选配搭载 3kg、5kg、10kg 不同负载的协作机器人。
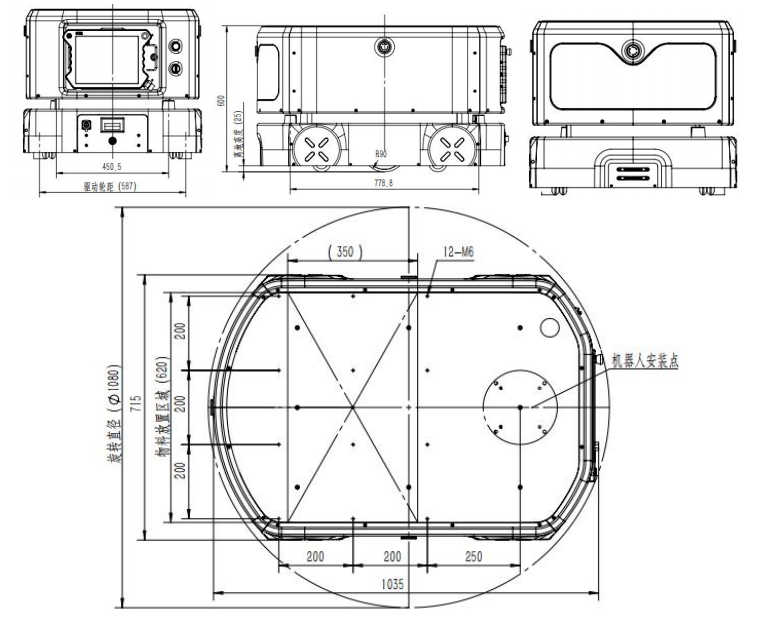
AMR机器人尺寸图
2D 视觉
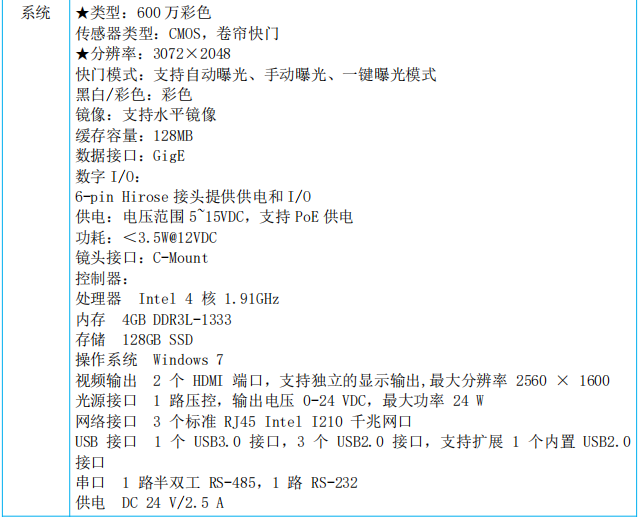
600 万彩色工业相机,卷帘快门,分辨率:3072×2048。支持自动或手动调节增益、曝光时间、LUT、 Gamma 校正等。采用千兆网接口,无中继情况下,最大传输距离可到 100m,兼容 GigE Vision 1.2 协议及 GenlCam 标准,无缝接入第三方软件平台,平台提供配套光源与相机支架。
2D相机

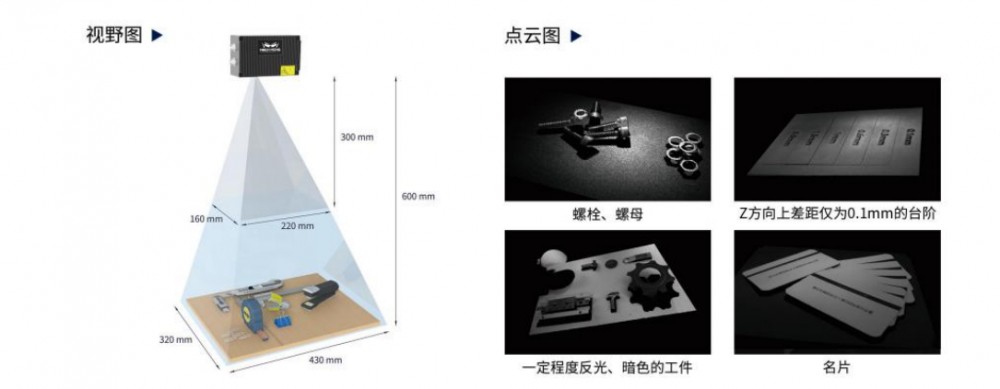
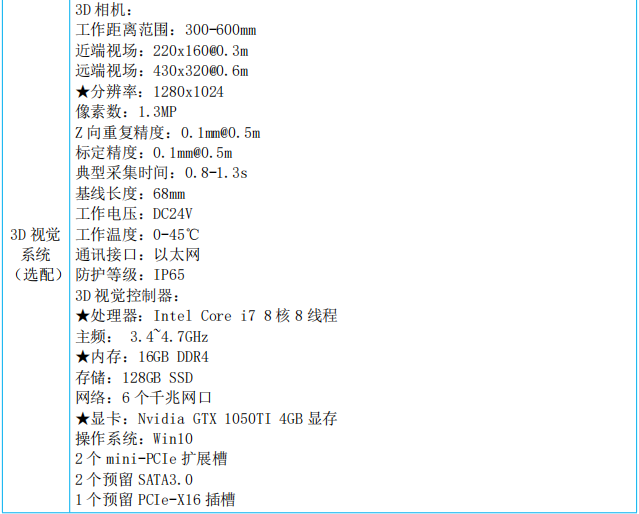
3D 视觉(选配)
复合机器人可以支持选配 3D 视觉系统使用,配套 3D 视觉系统硬件,提供 3D 视觉软件平台。
3D相机

工作距离范围:300-600mm
近端视场:220x160@0.3m
远端视场:430x320@0.6m
分辨率:1280x1024
像素数:1.3MP
Z 向重复精度:0.1mm@0.5m
标定精度:0.1mm@0.5m
典型采集时间:0.8-1.3s
基线长度:68mm
通讯接口:以太网
防护等级:IP65
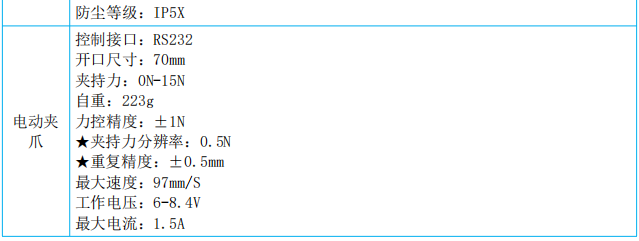
电动夹爪
电动夹爪是一款利用小体积大扭矩直线伺服驱动器设计生产的电动夹爪。该夹爪内部集成了 1 个直线 伺服驱动器,用户接口采用 RS232 通信接口,内置灵敏的压力传感器,通过设置不同的压力阈值方便用户 进行不同硬度物体的夹取,简洁高效的接口控制指令可使用户快速实现对夹爪的操控,优质的性能使该夹 爪应用于服务机器人、教学教具等领域。 这款夹爪可设置爪子张合时的速度、力度、位置。其中速度设置范围为 0~255,力度设置范围为 0~255, 位置设置范围为 0~255。电动夹爪最大开口为 70 毫米,最高可实现 1.5Kg 的夹持力。
电动夹爪

安全认证
遨博协作机器人通过PL=d国际安全认证,系统安全性已达到行业领先水平。并先后获得欧盟CE认证、北美安全认证、韩国Kcs认证等,拥有进驻欧洲、美国、加拿大、韩国等国际市场的资格。

合作伙伴
