
3D打印技术让机器人更安静|设计师小记 ②
在研发过程中,我们发现当机器人在室内行走时,每一步踩踏地板上,都会发出清晰的“咚咚”声。安静的空间会像天然的“扩音器”,把这种脚步声放大得格外突兀。当机器人进入家庭,噪声问题会变得更加敏感,这让我们开始思考,如何能减弱机器人踩踏地板的声音?

01
机器人脚底的'咚咚'声从哪里来
声音的本质是物体振动产生的机械波。机器人在行走时,每一步的重量都会通过脚掌传递到地面,想要降低足端踩踏地板的声音,本质上是要减少触地瞬间产生和传导的振动。影响它的,主要有几方面:
①脚掌材质
硬质材料直接与地板碰撞时,几乎没有形变,冲击力直接在空气中传递,声音清脆且尖锐。软质材质与地板接触时,自身会产生形变,吸收部分冲击能量,声音相对更柔和。
②脚掌大小
接触面积影响压强。面积越小,同样力的作用下,压强更大,接触瞬间产生的冲击力越集中,容易产生“咚”的重响;面积更大时,能把重量分散,减弱瞬时振幅,声音自然更小。就像穿平底鞋会比高跟鞋声音更轻。
③落地方式
落地速度、角度和力度,会影响冲击能量的传递。快速重踩比轻柔落地声音更大。这让我们开始关注机器人行走时的落地控制和步态优化。
基于此,我们开始寻找能从源头上让足端踩踏地板更安静的办法,从结构层面入手,吸收并分散落地瞬间的振动。
声音传播示意图
02
晶格结构:给机器人穿上“气垫”鞋
在寻找解决方案的过程中,我们发现了一种特别的设计——晶格结构。
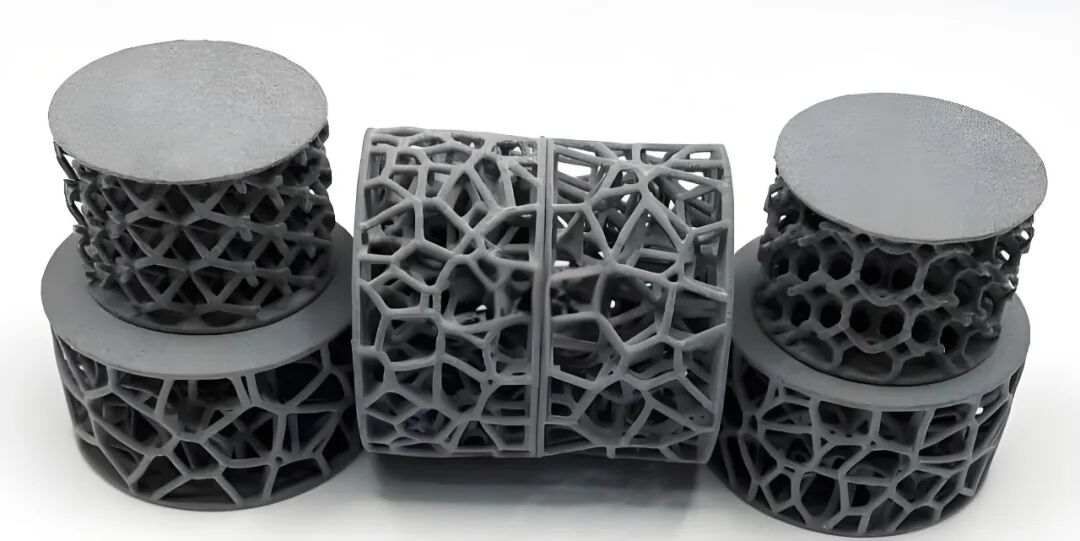
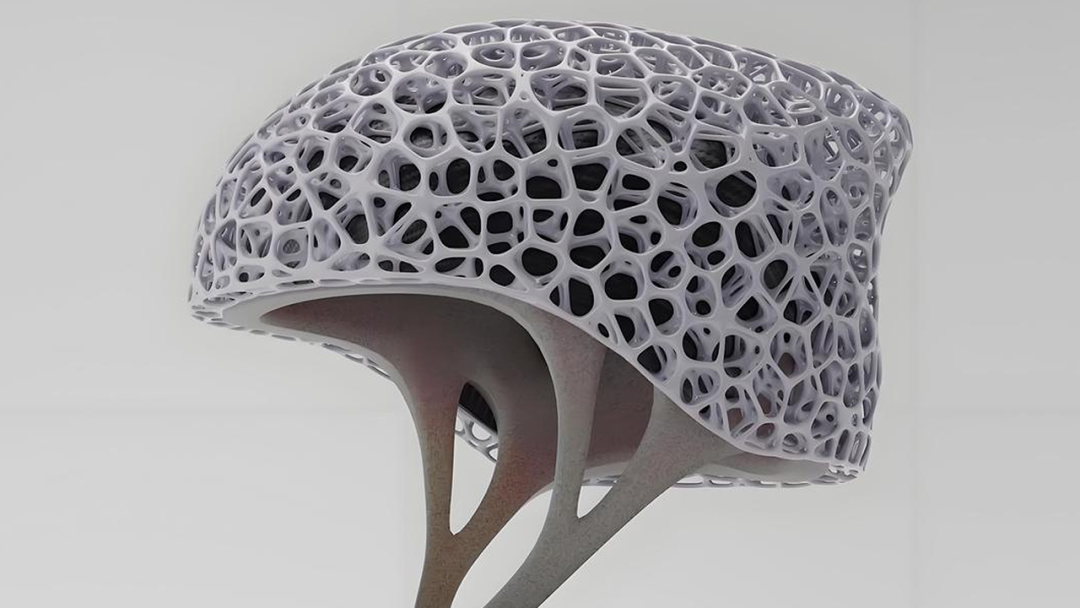
它不同于一整块实心材料,而是由无数小格子拼成的空心网格,像蜂窝一样牢固,每个小格子还能通过不同的方向和位置组合,形成多样化的整体结构,具有减震和轻量化的特点。
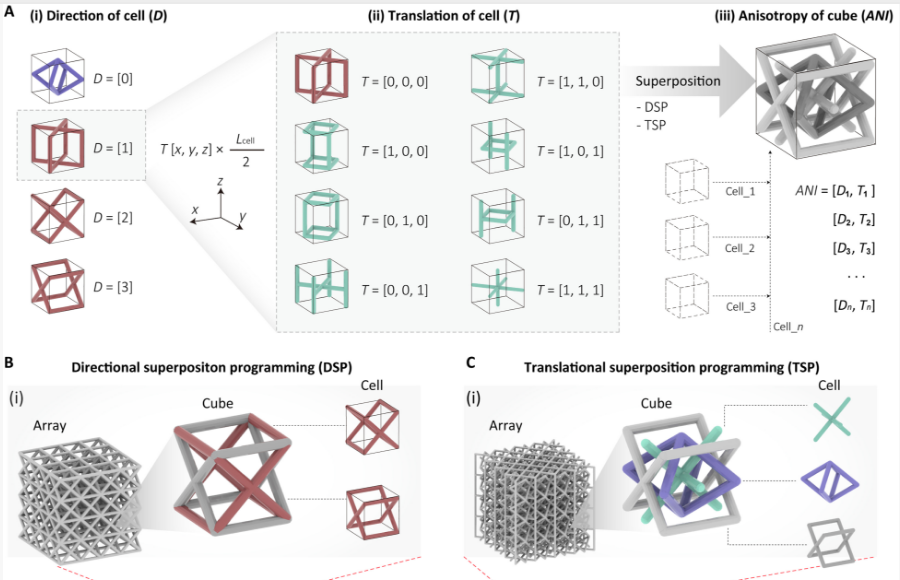
晶格结构最小单元示意图
①减震
传统的实心结构受力后,振动会沿着刚性材料直接传导,噪声更集中、尖锐。晶格结构内部由大量空隙和小单元格组成,像是在材料内部织出蜂窝状的网格,每个小格子都能在受力时轻微形变,分担冲击力量。当机器人足端落地时,内部单元格像“弹簧”一样能在微小形变中吸收一部分能量,把冲击能量分散开,削弱振动向外传播。
②轻量化
传统的实心结构虽然稳固,但往往过于笨重,脚掌越重,能量消耗也越高。晶格结构内部是空心的网格,相比实心结构更轻,却依然能保持强度。就像在机器人的脚掌里装上了无数个微型气垫,能在承重的同时减弱冲击,让机器人走得更轻快、更安静。
03
为什么使用3D打印技术
晶格结构具有能缓冲冲击、降低噪音、轻量化的特点,看上去是理想的方案,但难点在于它的几何太复杂。传统工艺很难胜任。

注塑成型,像是用冰格模具做冰块,把液体灌进模具,等凝固后再脱模。但内部如果有很多悬空的细节,模具无法完整“拔出来”。CNC加工,像是雕刻木头,靠刀具一层层切掉多余的材料。但刀具只能从外部进入,遇到复杂的内腔和交错的格子,很快就会被“卡住”。
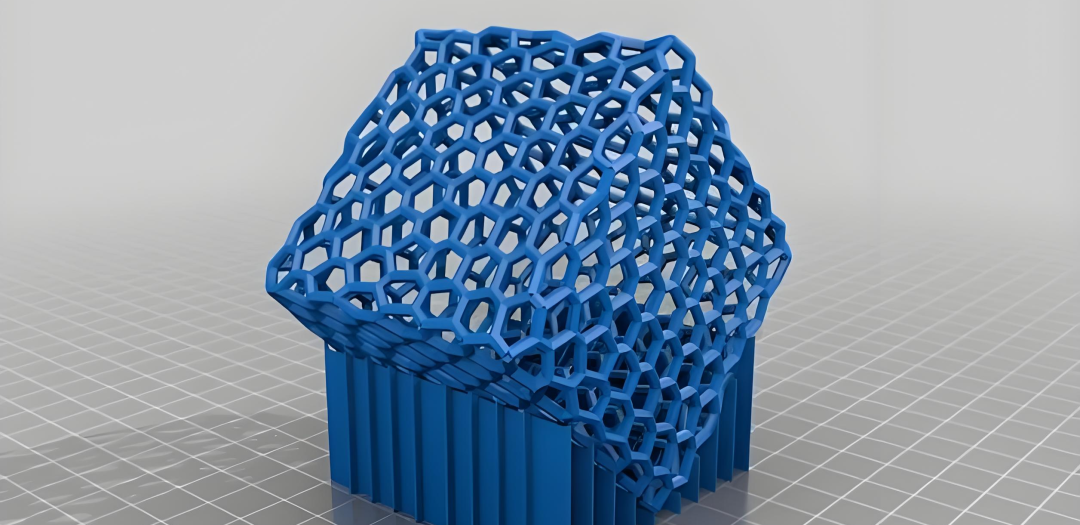
传统工艺更擅长加工实心整体或规则形状,却无法处理晶格这种精细又复杂的内部结构。3D 打印则提供了全新的路径。
3D 打印的原理,和传统工艺正好相反,不需要脱模和切割材料,而是基于三维模型数据通过一层层堆积,直接制造与相应数字模型完全一致的实体模型。一体成型,没有多余的拼接,也在一定程度上避免松动与噪声。逐层叠加的方式不仅节省材料,更让复杂结构的制造变得可行。

在造一台机器人的过程中,我们不断思考:人与机器要如何相处,才能更加自然、舒服。我们希望,机器人走进家庭时,它不仅要聪明、可靠,还要“安静”。晶格结构与 3D 打印的结合,让我们在减震与轻量化之间找到了新的平衡,也让“降低脚步声”变得可能。
也欢迎大家和我们一起继续讨论:当机器人进入我们的生活,你最关注哪个细节?